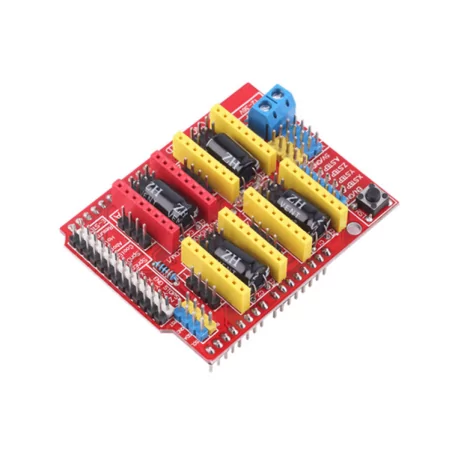




CNC Shield V3 A4988 Controller for RAMPS1.4 Reprap
- Carte CNC Shield : dernière version pour CNC Shield Version 3.0 GRBL 0.9 compatible 4 axes (X, Y, Z, A-Peut dupliquer X, Y, Z ou faire un 4ème axe complet avec un firmware personnalisé en utilisant les broches D12 et D13) 2 x Butées de fin de course pour chaque axe (6 au total) Activation du liquide de refroidissement Compatible avec le pilote pas à pas A4988 ou DRV8825 Fonctionne sur 12-36V DC
- L'A4988 est un pilote de moteur micropas complet avec convertisseur intégré pour une utilisation facile. Le produit peut faire fonctionner des moteurs pas à pas bipolaires en mode pas complet, demi, quart, 1/8 et 1/16 pas, avec des performances d'entraînement de sortie jusqu'à 35 V et ±1 A.
- Cette carte d'extension en tant que carte d'extension de pilote peut être utilisée pour les machines de gravure,
- L'A4988 comprend un régulateur de courant à temps d'arrêt fixe qui peut fonctionner en mode d'atténuation lente ou mixte.
- Broche PWM et goupilles de direction. Prise en charge 4 axes. Fonctionne sur 12-36V DC Il s'agit d'un total de quatre emplacements, peut piloter quatre moteurs pas à pas A4988. Chaque moteur pas à pas de route n'a besoin que de deux ports IO. Six ports IO peuvent être bien gérés avec trois moteurs pas à pas. Très pratique à utiliser.


: Vous pouvez voir les tarifs d'expédition et estimations de livraison cliquant ici

: Retour sous 7 jours avec conditions, cliquez pour plus de détails
Description:
100% neuf et de haute qualité
Cette carte d'extension en tant que carte d'extension de pilote, peut être utilisée pour les machines à graver
C'est un total de quatre emplacements, peut conduire quatre moteurs pas à pas a4988. Chaque moteur pas à pas de route n'a besoin que de deux ports IO. En d'autres termes, six ports IO peuvent bien gérer trois moteurs pas à pas. Très pratique à utiliser.
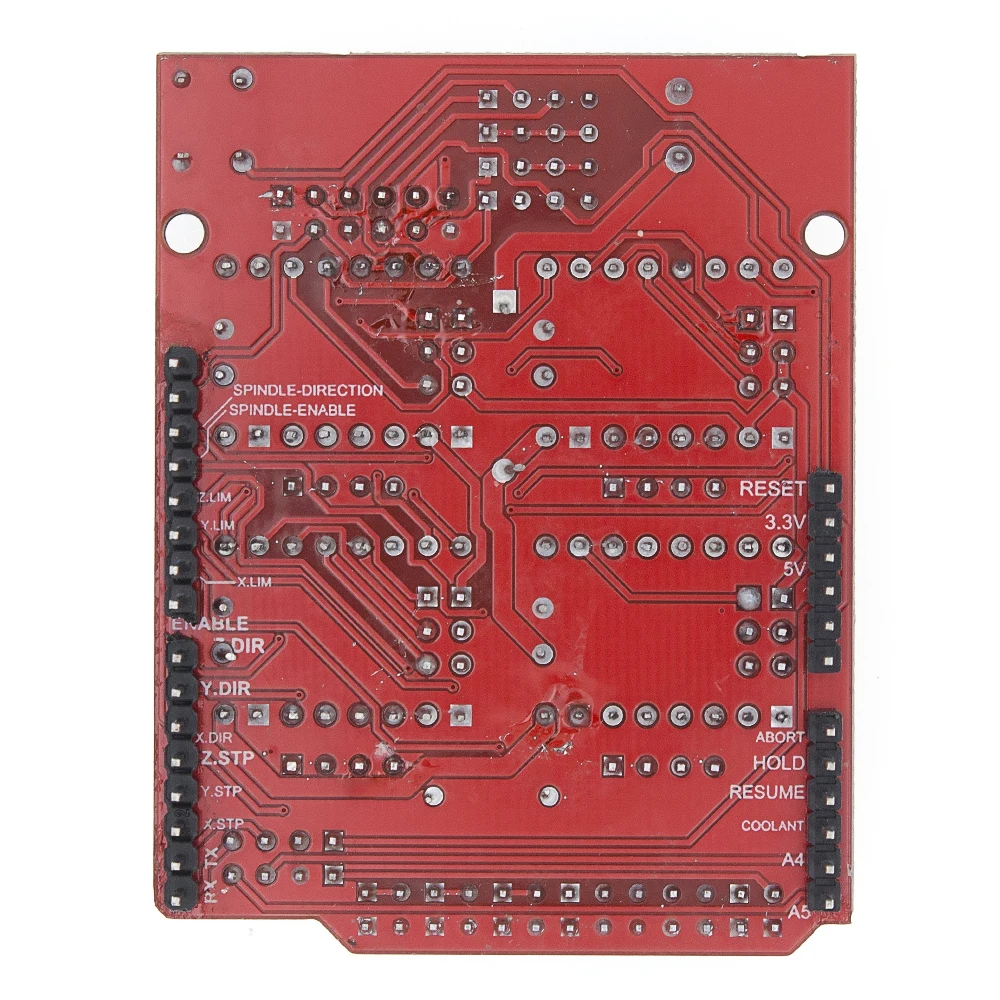
Introduction de la correspondance du port IO du module UNO.
IO correspondant figure ci-dessus
UNO ---------------------- carte d'extension
8 pouces (pilote de moteur pas à pas activé, actif faible)
7. Z.DIR (contrôle de direction de l'axe Z)
6 Y.DIR (contrôle de direction de l'axe Y)
5 X.DIR (contrôle de direction de l'axe X)
4 Z. Étape (commande pas à pas de l'axe Z)
3. Étape Y. (commande pas à pas de l'axe Y)
2 X. Étape (commande pas à pas de l'axe X)
//Ce qui suit est une procédure de contrôle de moteur pas à pas simple,
# Définir EN 8 / /activation du moteur pas à pas, actif faible
# Définir X_DIR 5 / /axe X contrôle de direction du moteur pas à pas
# Définir Y_DIR 6 / / y axe moteur pas à pas contrôle de direction
# Définir le contrôle de direction du moteur pas à pas de l'axe Z_DIR 7/z
# Définir X_STP 2 / /x-axis stepper control
# Définir Y_STP 3 / /contrôle pas à pas de l'axe y
# Définir Z_STP 4 / /contrôle pas à pas de l'axe z
/*
//Fonction: étape. Fonction: pour contrôler la direction du moteur pas à pas, le nombre de pas.
//Paramètres: contrôle de direction dir, broche DIR du moteur pas à pas correspondant, broche dir du moteur pas à pas correspondant, broche «pas» du moteur pas à pas, nombre de pas sans valeur de retour.
*/
Pas de vide (boolean dir, byte dirPin, byte stepperPin, int step)
Écriture numérique (dirPin, dir);
Délai (50);
Pour (int i = 0; i <pas; i +)
Écriture numérique (stepper pin, haut);
Delaymicrosecondes (800);
Écriture numérique (stepper pin, LOW);
Delaymicrosecondes (800);
Configuration vide () {/ /le moteur pas à pas utilisé dans la broche IO est réglé pour sortir
PinMode (X_DIR, sortie); pinMode (X_STP, sortie);
PinMode (Y_DIR, sortie); pinMode (Y_STP, sortie);
PinMode (Z_DIR, sortie); pinMode (Z_STP, sortie);
PinMode (EN, sortie);
Écriture numérique (EN, faible);
Vide boucle ()
Pas (faux, X_DIR, X_STP, 200); / /moteur d'axe X inversé 1 anneau, le pas 200 est un cercle.
Pas (faux, Y_DIR, Y_STP, 200); / /moteur d'axe y inversé 1 anneau, le pas 200 est un cercle.
Pas (faux, Z_DIR, Z_STP, 200); / /moteur d'axe z inversé 1 anneau, le pas 200 est un cercle.
Délai (1000);
Pas (vrai, X_DIR, X_STP, 200); / /moteur d'axe X en avant 1 tours, le pas 200 est un cercle.
Pas (vrai, Y_DIR, Y_STP, 200); / /moteur d'axe y en avant 1 tours, le pas 200 est un cercle.
Pas (vrai, Z_DIR, Z_STP, 200); / /moteur d'axe z en avant 1 tours, le pas 200 est un cercle.
Délai (1000);










")

")




